
Le projet "Dark Noise"
Introduction
L'idée qui fonde le projet "Dark Noise" est de constituer une base de
données consultable par tous sur les performances des capteurs
d'appareil photo en matière de bruit.
La plupart des mesures portant sur les capteurs ne peuvent être
effectuées qu'avec des appareils de mesure complexes, inabordables
pour l'amateur. Cependant, certaines opérations peuvent être
effectuées simplement, et amener malgré tout des informations
intéressantes.
Parmi ces mesures, celle du bruit noir est la plus simple à faire. Il
suffit en effet de prendre des photographies avec le couvre objectif
en parcourant un ensemble de vitesse et de sensibilité, puis de traiter
les résultats obtenus. On peut alors observer l'évolution du bruit en
fonction de la sensibilité ISO et du temps de pose.
Si vous souhaitez participer à ce projet et faire apparaître votre appareil dans la base de données, il vous faudra suivre la procédure décrite ci-dessous.
Mode opératoire
Méthode simple
La procédure décrite ci-dessous permet de récupérer les informations de bruit de votre appareil et de les intégrer dans notre base de données.
- L'idéal est de travailler avec une carte mémoire vierge pour éviter tous risques d'erreur.
- Placer l'appareil en mode RAW.
- Placer l'appareil en mode manuel
- Faire une première photographie complètement surexposée (typiquement, viser une zone trés lumineuse et prendre la photographie avec l'objectif ouvert à fond et avec une vitesse de l'ordre du dixième de seconde).
- Placer le couvre objectif sur l'appareil, fermer le diaphragme au maximum, (sur un réflex obturer également l'oeilleton de visée); si votre compact ne dispose pas de couvre objectif, il faut se placer dans l'obscurité, ou protéger la lentille en utilisant la méthode MacGyver.
-
Prendre plusieurs séries de photographies. Ces séries peuvent être
par exemple:
- 50 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 100 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 200 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 400 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 800 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 1600 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 3200 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- Placer les fichiers dans une zone de partage de fichiers et m'envoyer un mail à sensor@photo-lovers.org m'indiquant où je peux les récupérer. Si vous ne disposez pas de zone de partage, envoyez-moi également un mail et je vous ourirai un accès en téléchargement sur un serveur ftp.
Méthode évoluée
Afin d'éviter de transférer d'énormes fichiers contenant les photographies bruitées, un petit logiciel qu'il vous faudra télécharger sur ce site va effectuer la compression et le traitement préliminaire des données.
-
Télécharger la version du programme qui correspond à votre système
d'exploitation. Elles sont disponibles à partir du paragraphe
"Téléchargement" qui suit.
Sous Windows, décompresser le fichier ".zip" et placer le dossier résultant n'importe où sur votre disque; par exemple, si vous utilisez l'explorateur windows, cliquez deux fois sur sensorwin32.zip, puis attrapez le dossier sensor avec la souris et posez le par exemple sur votre bureau.
Sous Linux 32 bits, utilisez la commande tar zxf sensorunix32.tgz
A l'intérieur du répertoire sensor se trouve les répertoires WHITE, RAW et le programme getdata.exe dont nous allons reparler. - L'idéal est de travailler avec une carte mémoire vierge pour éviter tous risques d'erreur.
- Placer l'appareil en mode RAW.
- Placer l'appareil en mode manuel
- Faire une première photographie complètement surexposée (typiquement, viser une zone trés lumineuse et prendre la photographie avec l'objectif ouvert à fond et avec une vitesse de l'ordre du dixième de seconde). Le fichier résultant devra être mis dans le répertoire WHITE. Attention à ne pas le mélanger avec les fichiers qui vont être créés par la suite. Attention également de ne mettre dans ce répertoire que le fichier RAW. Certains appareils génèrent parfois deux fichiers, dont un seul est le fichier RAW, l'autre étant une image JPEG (fichier se terminant généralement par JPG ou THM).
- Placer le couvre objectif sur l'appareil, fermer le diaphragme au maximum, (sur un réflex obturer également l'oeilleton de visée); si votre compact ne dispose pas de couvre objectif, il faut se placer dans l'obscurité, ou protéger la lentille en utilisant la méthode MacGyver.
-
Prendre plusieurs séries de photographies. Ces séries peuvent être
par exemple:
- 50 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 100 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 200 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 400 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 800 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 1600 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- 3200 ISO: 1/1000, 1/100, 1/10, 1s et 10s
- Placer les fichiers résultants dans le répertoire RAW (faire bien attention de ne mettre aucun autre fichier dans ce répertoire, et en particulier de ne pas y recopier par mégarde le fichier correspondant à la photo surexposée qu'il faut placer dans le répertoire WHITE...)
-
Cliquer deux fois sur le programme getdata.exe. Il faut alors
répondre à un certain nombre de questions. Entre chaque saisie, il faut appuyer sur la touche Entrée pour passer à la question suivante:
- Owner name ou nom du propriétaire: vous n'êtes pas tenu de répondre, ou vous pouvez proposer un pseudonyme.
- Serial number ou numéro de série: champ non obligatoire, mais utile si vous souhaitez retrouver votre appareil sur le site
- Temperature: utile pour étudier les variations du bruit en fonction de la température (il s'agit d'un entier, nous ne sommes pas au dixième de degré...)
- Après quelques secondes ou quelques minutes de calcul suivant le nombre de photos, getdata.exe va générer le fichier results.gz. Il faut alors envoyer ce fichier en pièce attachée à : sensor@photo-lovers.org. Le fichier est petit et cela ne consommera que peu de bande passante.
- Si votre appareil à un mode avec réduction de bruit (long exposure noise reduction), pensez à faire les deux séries de mesure (avec et sans réduction de bruit), ou à défaut d'indiquer dans votre envoi dans quel mode la mesure a été faite.
- Au bout de quelques heures ou de quelques jours en fonction de mes disponibilités, les statistiques de votre capteur apparaitront sur ce site.
- Caveat: ce programme utilise l'excellent logiciel dcraw de David Coffin. De ce fait, seuls les appareils supportés par dcraw sont supportés. La liste des appareils supportés est disponible sur le site de dcraw.
- Caveat bis: ce logiciel ne fonctionne probablement pas avec les appareils utilisant les capteurs Foveon. Si vous avez un appareil de ce type merci de me contacter si vous pouvez me fournir des fichiers RAW sur lesquels je puisse travailler.
Téléchargement
Plusieurs versions sont disponibles:
La version Windows 32 bits devrait également fonctionner pour toutes les versions de XP, y compris XP 64 bits. En revanche, je ne garantis pas le fonctionnement sous Vista.
Il n'y a pas de version pour Mac. Si quelqu'un a des bases de programmation en Ocaml sur Mac et souhaite porter le programme, il peut me contacter.
Appareils actuellement disponibles sur la base
- Canon EOS 5DS R
- Canon EOS 5D Mark II
- Canon EOS 40D
- Canon EOS 450D
- Canon EOS-1Ds Mark II
- EPSON R-D1
- MINOLTA DiMAGE A2
- NIKON E8400
- PENTAX K10D
- PENTAX K20D
- NIKON D80
- Leica M9
Lecture des courbes
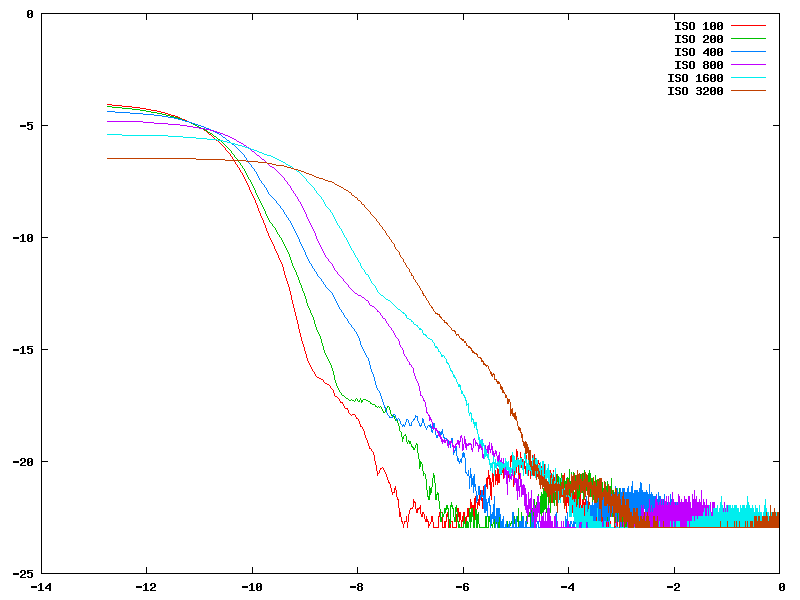
On peut voir ci-dessous l'exemple d'un ensemble de courbes décrivant le fonctionnement d'un capteur à ISO200 pour 4 vitesses différentes (approximativement 1/1000, 1/100, 1/10 et 1s).
En abscisse, on trouve une représentation de la valeur x lue dans le fichier, et en ordonnée le nombre de fois où cette valeur a été lue. Cependant ces valeurs sont retraitées de façon a être exprimée relativement à la valeur maximale que le capteur peut générer en abscisse, afin de respecter la notion de dynamique. En ordonnée, on ramène le nombre de fois où cette valeur a été lue au nombre de pixels du capteur.
Prenons comme exemple un appareil ayant un capteur de 8 millions de pixels et une dynamique de 12 bits. Si nous lisons 4100 fois la valeur 256 dans le fichier RAW, l'abscisse de ce point sera log2(256/2^12)=-4, et son ordonnée sera log2(4100/8000000)=-11
Sur la courbe ci-dessus, on voit que la majorité des valeurs lues se trouve aux alentours de -6, ce qui représente 1/2^6 soit 1/64ème de la valeur maximale exprimable par le capteur (soit encore une valeur de 2^12/2^6=64 pour un capteur 12 bits), et que cette valeur a été lue pour environ 2^(-3)=1/2^3=1/8ème du nombre total des pixels du capteur, soit pour un capteur de 8 millions de pixels, un million de pixels.
Cette représentation des résultats devrait permettre de comparer de façon simple les différents capteurs. Ce n'est malheureusement pas le cas pour plusieurs raisons. La première d'entre elles est que les constructeurs ne "calent" pas le zéro du capteur au même endroit. La courbe ci-dessus nous vient d'un capteur d'Epson RD-1, pour laquelle le zéro est clairement calé sur la valeur 64. Canon, de la même façon, cale le zéro sur une valeur qui est une puissance de 2 (128, 256,etc). On peut se demander quel peut-être l'intérêt d'une telle méthode, qui engendre inévitablement une légère perte de dynamique. En fait, il est possible de cette façon d'oberver exactement la courbe de bruit de part et d'autre du zéro. On dispose ainsi de bien plus d'informations sur la façon dont le capteur gère son bruit.
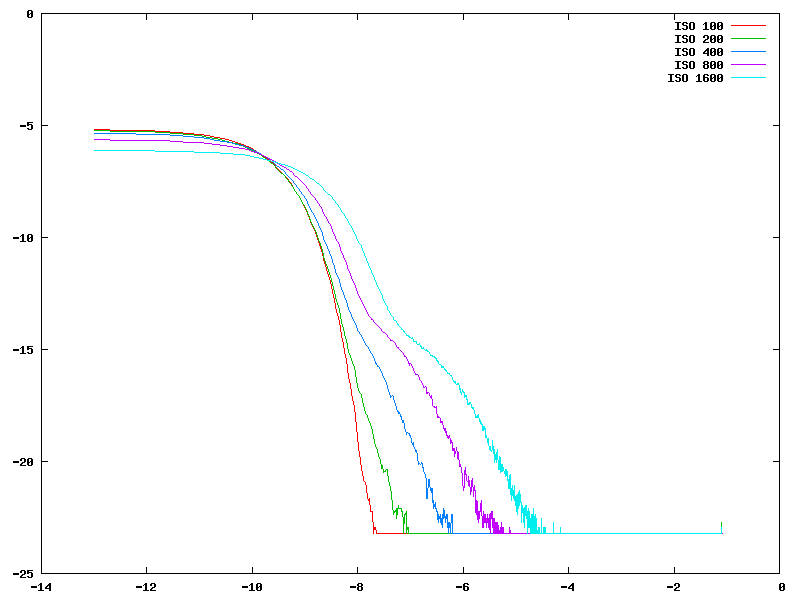
Il est indispensable de normaliser la courbe de bruit si l'on veut pouvoir comparer les différents capteurs. C'est pour cette raison qu'une courbe nommée ISO_n est présenté pour chaque appareil, chaque fois que la courbe doit être renormalisée par rapport au zéro. De cette façon, il devient possible de faire une comparaison visuelle. On peut voir ci-dessous la même courbe renormalisée.
Malheureusement, cela n'est pas totalement suffisant. En effet, certains appareils utilisent avant même la création du fichier RAW des dispositifs de réduction du bruit, et les valeurs stockées dans le fichier RAW sont parfois déjà pré-traitées. Ce problème est bien connu des astro-photographes, qui testent soigneusement les différents boitiers sur ce sujet particulièrement sensible. C'est ainsi que Nikon est connu pour ne pas fabriquer de boitier exploitable en astro-photographie, même sur ses boitiers haut de gamme (le D3 lui-même est affecté par ce défaut).
Il faut cependant savoir que ces dispositifs correcteurs de bruit existent sur de nombreux appareils mais sont généralement "débranchables". Ils s'appellent en général "Long Exposure Noise Reduction". Il s'agit en fait de soustraire à la photo prise une "prise noire", c'est à dire une prise faite en laissant le rideau fermé. Cela permet d'éliminer en principe les "pixels chauds" et autres anomalies du capteur. Ceci dit, tous les appareils ne réagissent pas de la même façon.
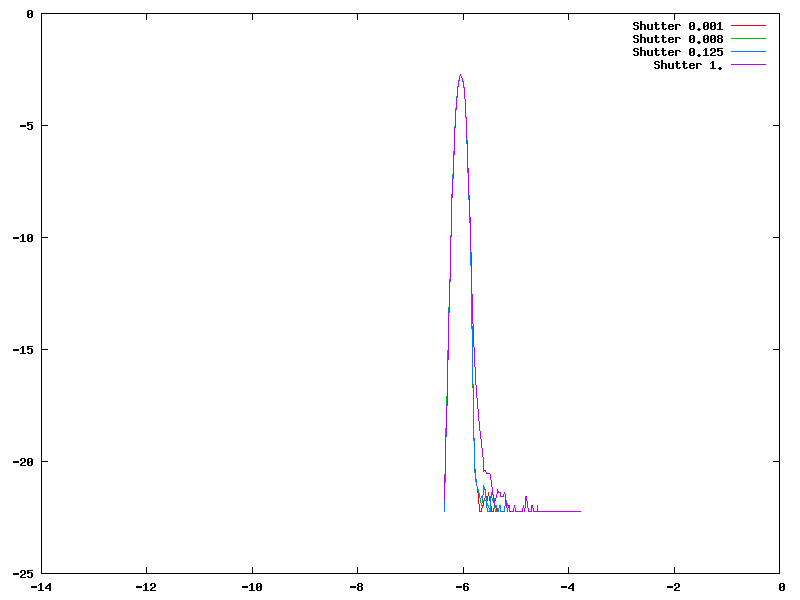
On peut voir ci-dessous la comparaison faite pour le Canon EOS 40D. Les différences sont très importantes et bien en accord avec la théorie:

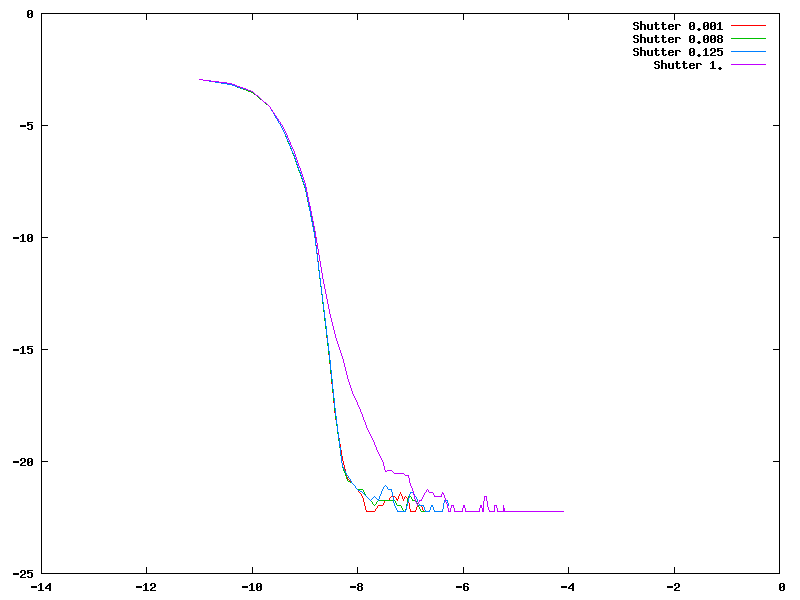
En revanche, si on fait le même test sur le 450D, les différences sont bien moins visibles. Certes, avec la réduction de bruit, le capteur est "nettoyée" dans la partie droite de la courbe, ce qui est certes le plus important; mais en revanche il laisse apparaitre des irrégularités plus importantes sur la partie gauche. En fait, je soupçonnerais volontiers le 450D d'appliquer même en version "sans réduction de bruit" une première réduction (peut-être une soustraction avec une image "de référence" stockée dans la mémoire morte de l'appareil).

Rien n'est donc parfait, et ces résultats doivent être considérés avec prudence. Ils n'en montrent pas moins un certain nombre de faits instructifs, et parfois en décalage par rapport aux discours des constructeurs...
En revanche, il ne sert à rien de jouer sur les paramètres du type "Réduction de bruit dans les hauts ISO"; il s'agit là exclusivement de corrections logicielles destinées au traitement de l'image dans l'appareil quand elle est convertie en JPEG. Cela n'a pas d'influence sur les fichiers de type RAW.
Le téléchargement ou la reproduction des documents et photographies
présents sur ce site sont autorisés à condition que leur origine soit
explicitement mentionnée et que leur utilisation
se limite à des fins non commerciales, notamment de recherche,
d'éducation et d'enseignement.
Tous droits réservés.
Dernière modification: 21:49, 20/03/2024